

改善二阶系统的措施
比例-微分控制与测速反馈控制的原理、传递函数及主要差别。
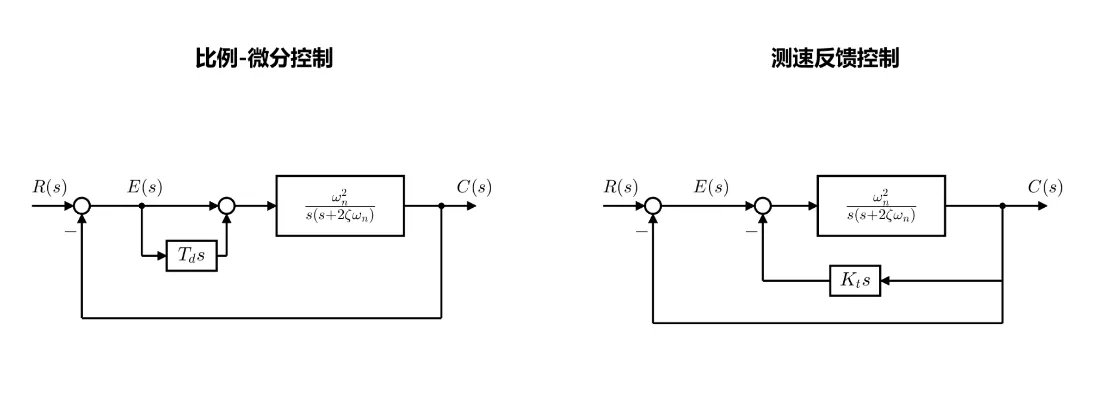
一、比例-微分控制
比例-微分控制作用在输入端误差信号上,对误差 进行比例和微分控制。
控制规律为:
其传递函数为:
其中:
所以比例-微分控制的阻尼来源是误差信号变化率。
闭环传递函数常写成:
它的特点是:能够增大阻尼、减小振荡、加快响应;但由于分子中出现了 ,所以会引入闭环零点。闭环零点会加快系统响应,但也可能使超调量增大。
另外,微分环节对高频信号非常敏感。因为微分在频域中相当于乘以 ,高频噪声容易被放大,所以比例-微分控制的抗噪声能力较差,实际应用中常要加滤波。
二、测速反馈控制
测速反馈控制作用在输出端速度信号上,把输出量的变化速度反馈回来。
测速反馈信号可理解为:
在拉氏变换下为:
所以测速反馈控制的阻尼来源是系统输出响应速度。
其闭环传递函数常写成:
它的特点是:能够增大阻尼、减小振荡、减小超调;但一般不引入闭环零点,只改变分母中的阻尼项。因此它对系统动态性能的改善更平稳。
测速反馈不像比例-微分控制那样直接对误差信号微分,所以对输入端高频噪声不那么敏感。但测速元件本身可能带来测量噪声,这类噪声会通过反馈通道进入系统。
三、主要差别总结
比例-微分控制的阻尼来自:
也就是误差信号的变化速度。
测速反馈控制的阻尼来自:
也就是输出响应的速度。
比例-微分控制会使闭环传递函数分子出现:
因此会引入闭环零点;测速反馈控制一般不引入闭环零点。
在相同阻尼比和自然频率条件下,比例-微分控制由于闭环零点影响,超调量通常大于测速反馈控制。
一句话背诵:
比例-微分控制对误差信号微分,靠 增加阻尼,响应快,但引入闭环零点,超调可能较大,且容易放大高频噪声;测速反馈控制对输出速度反馈,靠 增加阻尼,不引入闭环零点,减小超调和抑制振荡更平稳,但测速元件可能引入测量噪声。
Discussion
Comments
Share questions, corrections, or extra notes about this post.